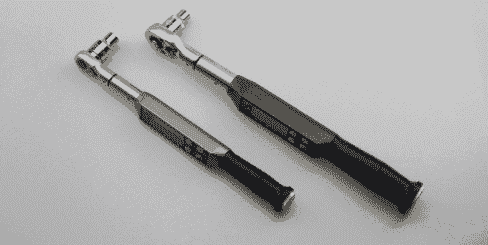
浅谈当前数显扭力扳手的不足之处
目前市场上的电子数显扭力扳手大多具有扭矩记忆功能,可以利用有线传输的方式,将存储的扭矩数据传输到上位机。下位机使用微处理器作为控制和数据处理中心,通过A/D转换模块采集扭矩数据,并具有扭矩实时显示和过扭矩预警功能。由于不同厂家使用的A/D采集芯片不同、标定算法不同和扭矩采集误差补偿方式的不同导致了数显扭力扳手精度存在较大差异,而且带有转向棘轮机构的扭矩扳手,其正向测量与反向测量精度往往差异较大。

当前电子数显扭力扳手主要存在如下几点不足:
一是正反向测量精度差异较大。测量精度较高的数显扭力扳手,往往在价格上十分昂贵,而且多为进口。国内的数显扭力扳手正向测量上精度能达到1%,但反向测量精度较差。
二是数据传输实时性低。当前市场上的数显扭力扳手数据传输方式主要依赖有线传输,当下位机的内部存储满时,才将数据取出。即使在上位机进行数据处理时发现不合格扭矩数据,往往也无法进行改正。这样的不合格数据通常都是由于操作者的错误施加预紧力造成的,这样就可能造成巨大的损失和安全隐患。虽然也存在具有无线传输的数显扭力扳手,但通过WiFi传输功耗很大,并且只能从扭力扳手到上位机的单向传输。
三是数据集成化程度较低。数显扭力扳手在数据传输过程中,往往只是将数据传输到上位机,数据所对应的操作对象、操作标准、操作者和时间等信息缺失。而且,在较大的装配车间其装配过程中产生数据量是巨大的,通过人力去完成费时费力。另外,获取标准扭矩是将目标扭矩值事先存储在数显扭力扳手中,由下位机从EEPROM中逐个读取。但是由于存储空间有限,根本无法满足一个产品所需要的标准扭矩存储量。而且在读取和保存标准扭矩值时,数据量较大必然导致操作更加复杂。
上一条: 国外电子数显型扭力扳手产品现状
下一条: X射线手持式荧光光谱仪的工作原理